بدلیل اهمیت ماشین سنکرون بعنوان تولید کننده انرژی در سیستم قدرت و همچنین برای بررسی مسائل پایداری سیستم نمی توان از مدل ساده ژنراتور سنکرون استفاده کرد و باید به سراغ مدل دقیق تری که بتواند حالت های گذرا و دینامیکی را نیز مدل کند رفت. از آنجا که تبدیل dq می تواند متغیرهای ماشین را در یک چارچوب مدل کند و حل معادلات متغیر با زمان را تسهیل کند، در این قسمت مدل dq ماشین سنکرون را دست می آوریم.
در این قسمت ابتدا معادلات ماشین سنکرون قطب برجسته را بدست آورده و به سمت استاتور منتقل می کنیم. سپس با اعمال تبدیل dq بر روی معادلات، مدل ماشین سنکرون را در دستگاه dq که با سرعت محور در حال چرخش است، بدست می آوریم.
سیم پیچی استاتور و روتور ماشین سنکرون قطب برجسته متعادل با توزیع سینوسی را بصورت زیر در نظر بگیرید: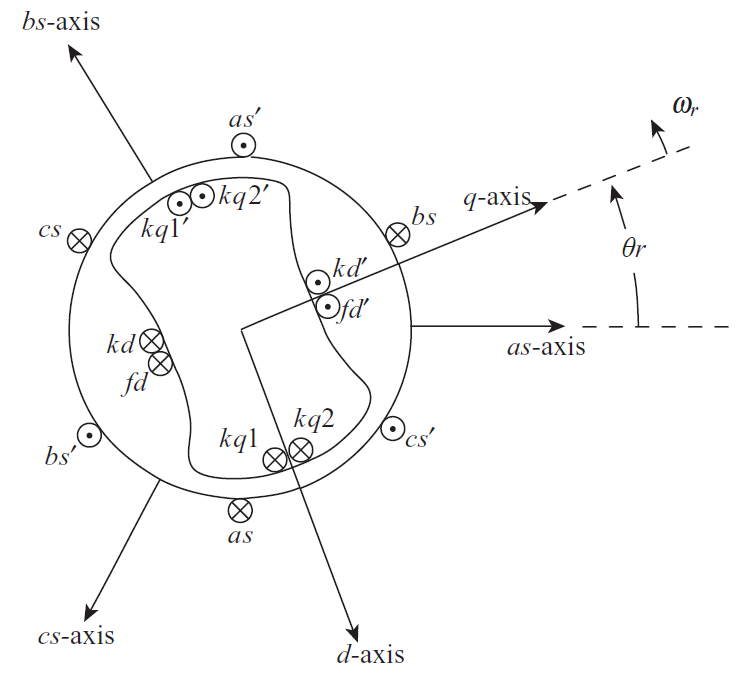 که می توان آن را بصورت زیر نمایش داد:
که می توان آن را بصورت زیر نمایش داد:
 همان طور که مشخص است روتور دارای یک سیم پیچی میدان (fd) و سه سیم پیچی دمپر می باشد. سیم پیچی های دمپر هر سه اتصال کوتاه بوده و علت استفاده از آنها مسائل مربوط به پایداری ژنراتور می باشد که اغتشاشات را سریع از بین ببرند. سیم پیچی دمپر kd بر روی محور d و سیم پیچی های kq1 و kq2 نیز بر روی محور q قرار گرفته اند.
همان طور که مشخص است روتور دارای یک سیم پیچی میدان (fd) و سه سیم پیچی دمپر می باشد. سیم پیچی های دمپر هر سه اتصال کوتاه بوده و علت استفاده از آنها مسائل مربوط به پایداری ژنراتور می باشد که اغتشاشات را سریع از بین ببرند. سیم پیچی دمپر kd بر روی محور d و سیم پیچی های kq1 و kq2 نیز بر روی محور q قرار گرفته اند.
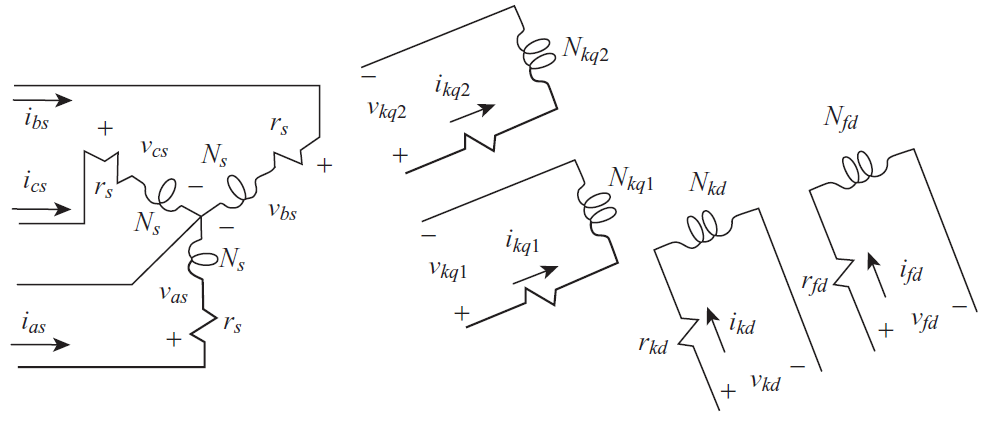
می توان معادله ولتاژ استاتور و روتور را بصورت زیر نوشت: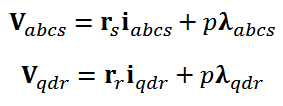
که اندیس s مربوط به پارامترهای استاتور و r مربوط به پارامترهای روتور می باشد و همچنین ماتریس متغیرها بصورت زیر می باشد: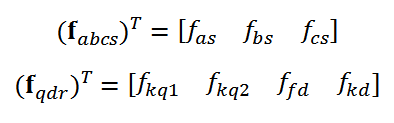
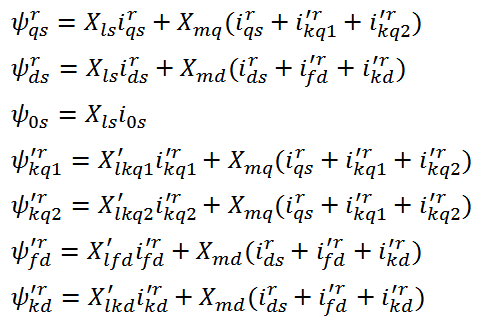
ماتریس های r[SUB]s[/SUB] و r[SUB]r[/SUB] یک ماتریس قطری می باشند. برای سیستم های خطی مغناطیسی، رابطه شار نشتی را بصورت زیر می توان نوشت: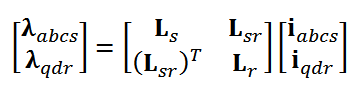
توجه کنید که Ls اندوکتانس بین سیم پیچی های استاتور، Lr اندوکتانس بین سیم پیچی های روتور و Lsr اندوکتانس متقابل بین سیم پیچی های استاتور و روتور می باشد. چون روتور را قطب برجسته در نظر گرفتیم با چرخش آن میزان اندوکتانس های استاتور نیز با زمان تغییر می کند. برای بدست آوردن اندوکتانس Ls شکل زیر را در نظر بگیرید: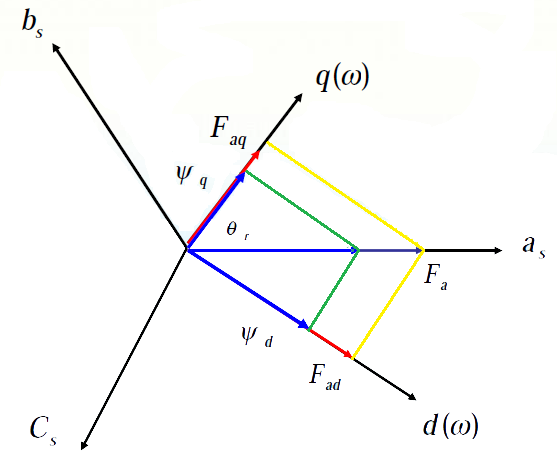 پس می توان نوشت:
پس می توان نوشت:
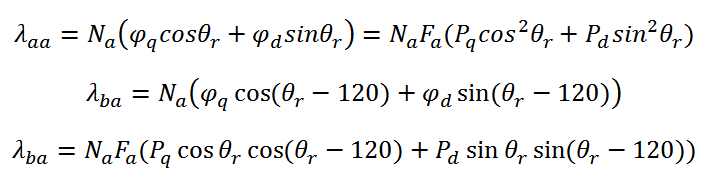
که P پرمانس مسیر شار (عکس مقاومت مغناطیسی) می باشد. پس برای محاسبه اندوکتانس های سیم پیچی استاتور داریم: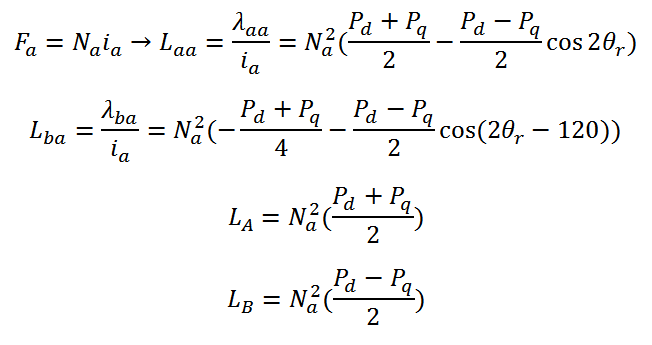 بنابراین ماتریس Ls بصورت زیر تعریف می شود:
بنابراین ماتریس Ls بصورت زیر تعریف می شود:
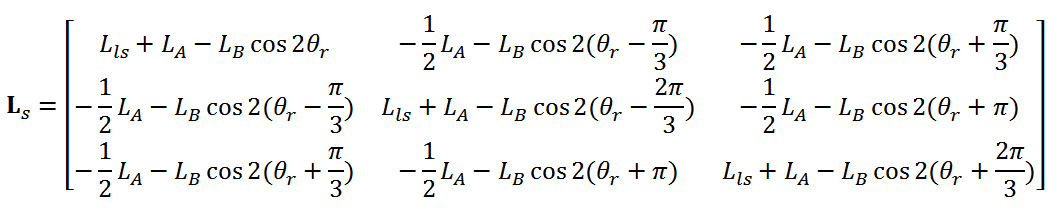
توجه کنید که مقدار L[SUB]A[/SUB] بزرگتر از L[SUB]B[/SUB] می باشد و برای روتور استوانه ای (غیر برجسته) مقدار L[SUB]B[/SUB] برابر صفر می باشد.
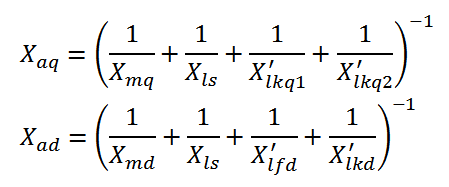
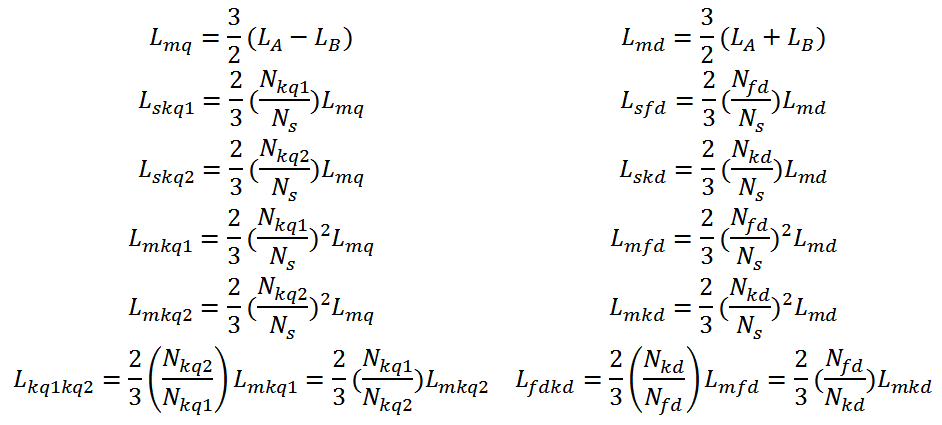
ماتریس های Lsr و Lr نیز بصورت زیر تعریف می شوند: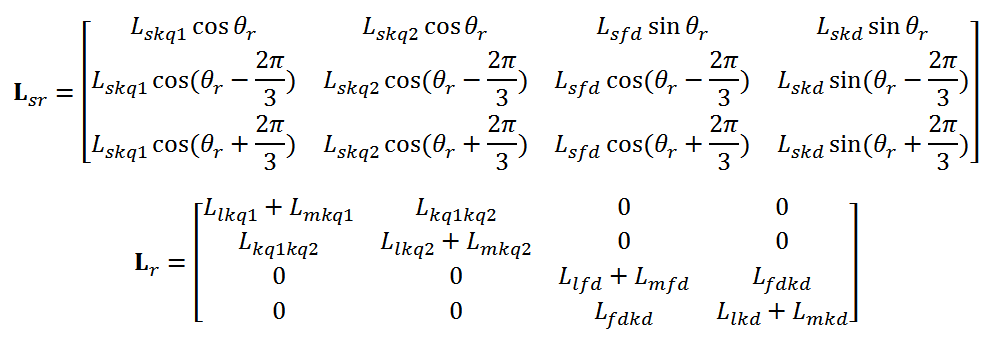 با تعریف اندوکتانس مغناطیسی بصورت زیر پارامترهای ماتریس های اندوکتانس بالا بصورت زیر محاسبه می شوند:
با تعریف اندوکتانس مغناطیسی بصورت زیر پارامترهای ماتریس های اندوکتانس بالا بصورت زیر محاسبه می شوند:
حال باید مقادیر ولتاژ، جریان، شار و همچنین اندوکتانس نشتی سیم پیچی ها و مقاومت آنها را به سمت استاتور ارجاع داد. با توجه به تعداد دورهای سیم پیچی استاتور و روتور داریم: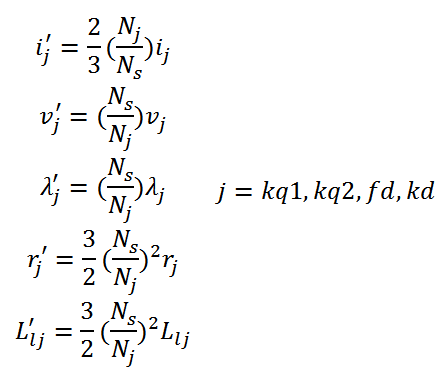
بنابراین ماتریس های اندوکتانس متقابل و روتور بصورت زیر تبدیل می شوند: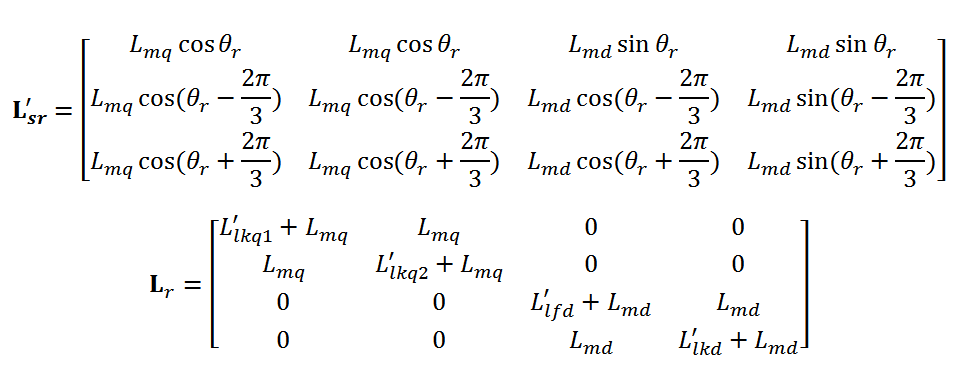 بنابراین معادلات ولتاژ بصورت زیر تبدیل می شوند:
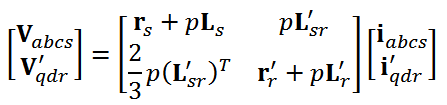
بنابراین معادلات ولتاژ بصورت زیر تبدیل می شوند:
تا اینجا روابط را بسمت استاتور انتقال داده ایم. همان طور که از روابط مشخص است کمیت های فازها به هم وابسته و ماتریس اندوکتانس نیز با زمان تغییر می کند. برای حل این مشکلات معادلات از تبدیل dq0 که با سرعت سنکرون می چرخد استفاده می کنیم.
توجه کنید چون مولفه های روتور خود بر روی قاب مرجع هستند نیازی به تبدیل ندارند و فقط مولفه های استاتور تبدیل می شوند.
ماتریس انتقال dq برای انتقال پارامترهای استاتور به قاب مرجع dq عبارت است از: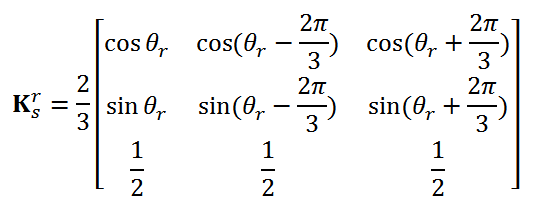
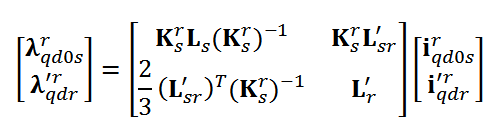
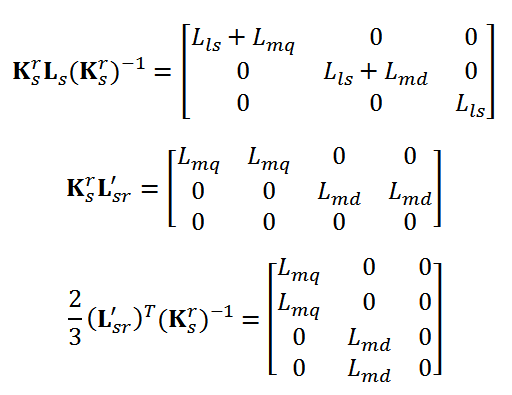
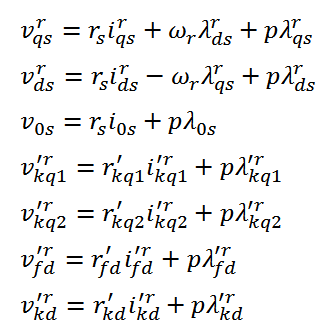
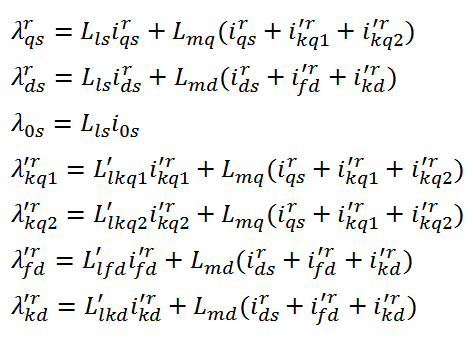
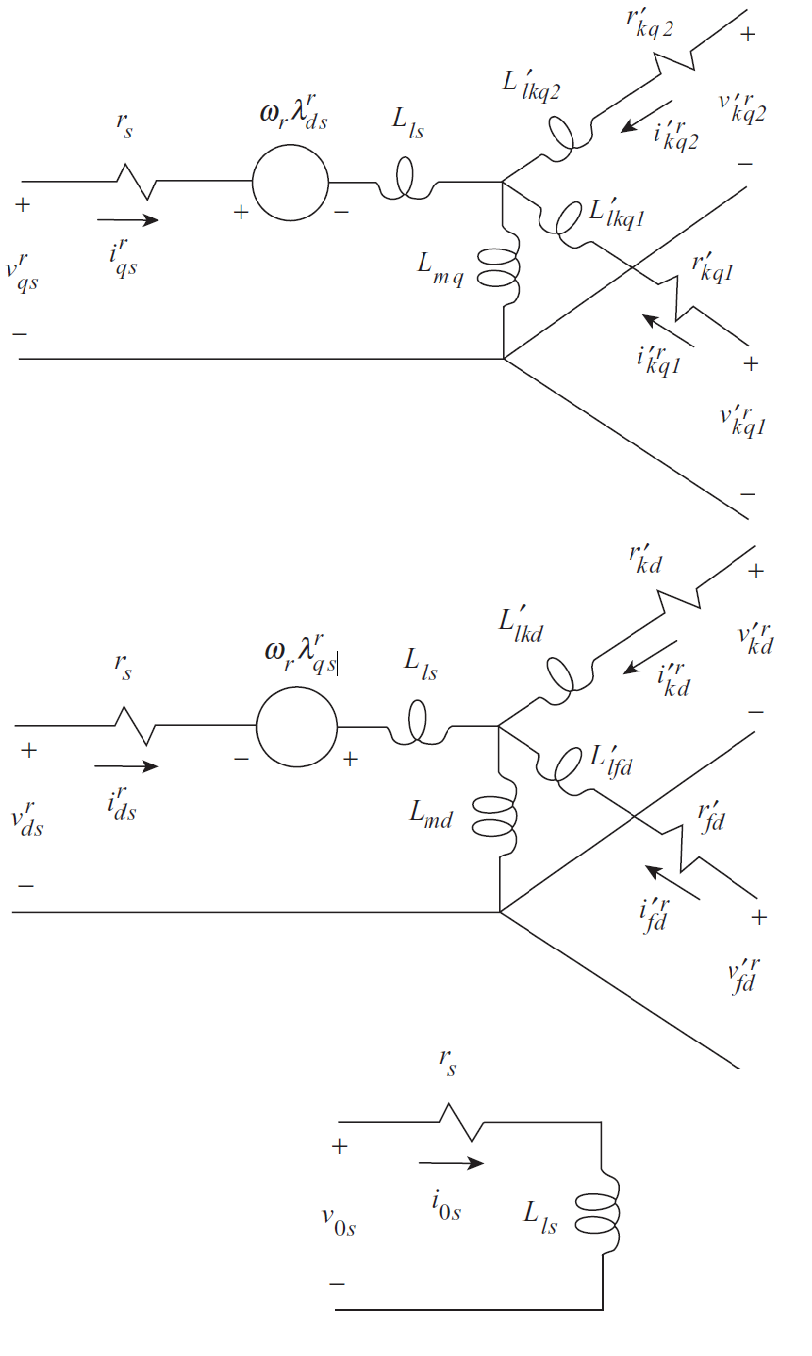
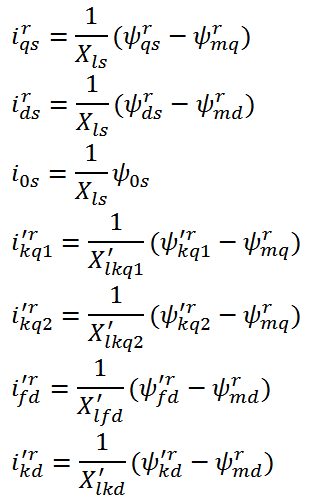
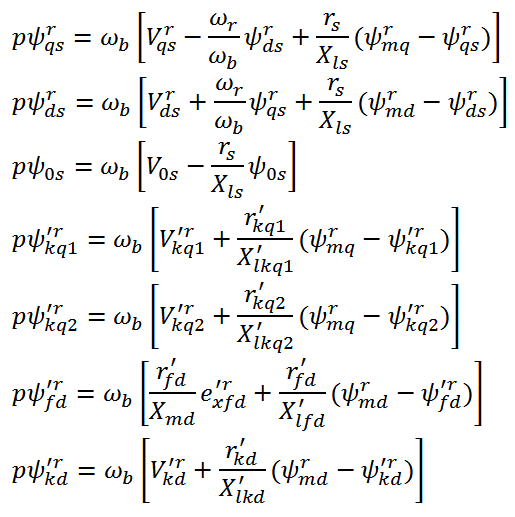
بنابراین با انتقال معادلات بالا به قاب مرجع dq و با ساده سازی روابط، معادلات ولتاژ در قاب مرجع dq بصورت زیر محاسبه می شوند: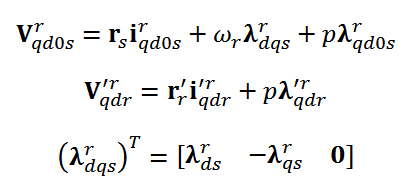 که قسمت اول مربوط به ولتاژ اهمی، قسمت دوم مربوط به ولتاژ حرکتی و قسمت سوم مربوط به ولتاژ ترانسفورمری می باشد.
که قسمت اول مربوط به ولتاژ اهمی، قسمت دوم مربوط به ولتاژ حرکتی و قسمت سوم مربوط به ولتاژ ترانسفورمری می باشد.
در این قسمت ابتدا معادلات ماشین سنکرون قطب برجسته را بدست آورده و به سمت استاتور منتقل می کنیم. سپس با اعمال تبدیل dq بر روی معادلات، مدل ماشین سنکرون را در دستگاه dq که با سرعت محور در حال چرخش است، بدست می آوریم.
سیم پیچی استاتور و روتور ماشین سنکرون قطب برجسته متعادل با توزیع سینوسی را بصورت زیر در نظر بگیرید:
که می توان آن را بصورت زیر نمایش داد:
همان طور که مشخص است روتور دارای یک سیم پیچی میدان (fd) و سه سیم پیچی دمپر می باشد. سیم پیچی های دمپر هر سه اتصال کوتاه بوده و علت استفاده از آنها مسائل مربوط به پایداری ژنراتور می باشد که اغتشاشات را سریع از بین ببرند. سیم پیچی دمپر kd بر روی محور d و سیم پیچی های kq1 و kq2 نیز بر روی محور q قرار گرفته اند.می توان معادله ولتاژ استاتور و روتور را بصورت زیر نوشت:
که اندیس s مربوط به پارامترهای استاتور و r مربوط به پارامترهای روتور می باشد و همچنین ماتریس متغیرها بصورت زیر می باشد:
ماتریس های r[SUB]s[/SUB] و r[SUB]r[/SUB] یک ماتریس قطری می باشند. برای سیستم های خطی مغناطیسی، رابطه شار نشتی را بصورت زیر می توان نوشت:
توجه کنید که Ls اندوکتانس بین سیم پیچی های استاتور، Lr اندوکتانس بین سیم پیچی های روتور و Lsr اندوکتانس متقابل بین سیم پیچی های استاتور و روتور می باشد. چون روتور را قطب برجسته در نظر گرفتیم با چرخش آن میزان اندوکتانس های استاتور نیز با زمان تغییر می کند. برای بدست آوردن اندوکتانس Ls شکل زیر را در نظر بگیرید:
پس می توان نوشت:
که P پرمانس مسیر شار (عکس مقاومت مغناطیسی) می باشد. پس برای محاسبه اندوکتانس های سیم پیچی استاتور داریم:
بنابراین ماتریس Ls بصورت زیر تعریف می شود:
توجه کنید که مقدار L[SUB]A[/SUB] بزرگتر از L[SUB]B[/SUB] می باشد و برای روتور استوانه ای (غیر برجسته) مقدار L[SUB]B[/SUB] برابر صفر می باشد.
ماتریس های Lsr و Lr نیز بصورت زیر تعریف می شوند:
با تعریف اندوکتانس مغناطیسی بصورت زیر پارامترهای ماتریس های اندوکتانس بالا بصورت زیر محاسبه می شوند:
حال باید مقادیر ولتاژ، جریان، شار و همچنین اندوکتانس نشتی سیم پیچی ها و مقاومت آنها را به سمت استاتور ارجاع داد. با توجه به تعداد دورهای سیم پیچی استاتور و روتور داریم:
بنابراین ماتریس های اندوکتانس متقابل و روتور بصورت زیر تبدیل می شوند:
بنابراین معادلات ولتاژ بصورت زیر تبدیل می شوند:
تا اینجا روابط را بسمت استاتور انتقال داده ایم. همان طور که از روابط مشخص است کمیت های فازها به هم وابسته و ماتریس اندوکتانس نیز با زمان تغییر می کند. برای حل این مشکلات معادلات از تبدیل dq0 که با سرعت سنکرون می چرخد استفاده می کنیم.
توجه کنید چون مولفه های روتور خود بر روی قاب مرجع هستند نیازی به تبدیل ندارند و فقط مولفه های استاتور تبدیل می شوند.
ماتریس انتقال dq برای انتقال پارامترهای استاتور به قاب مرجع dq عبارت است از:
بنابراین با انتقال معادلات بالا به قاب مرجع dq و با ساده سازی روابط، معادلات ولتاژ در قاب مرجع dq بصورت زیر محاسبه می شوند:
که قسمت اول مربوط به ولتاژ اهمی، قسمت دوم مربوط به ولتاژ حرکتی و قسمت سوم مربوط به ولتاژ ترانسفورمری می باشد.